Overview
I built Picar during an overnight hackathon at Carnegie Mellon Univeristy. It’s a small robotic car controlled by a Raspberry Pi, equipped with sonar sensors that let it detect and avoid obstacles on its own. I handled everything from wiring and assembly to coding the logic in Python, all within a single night.
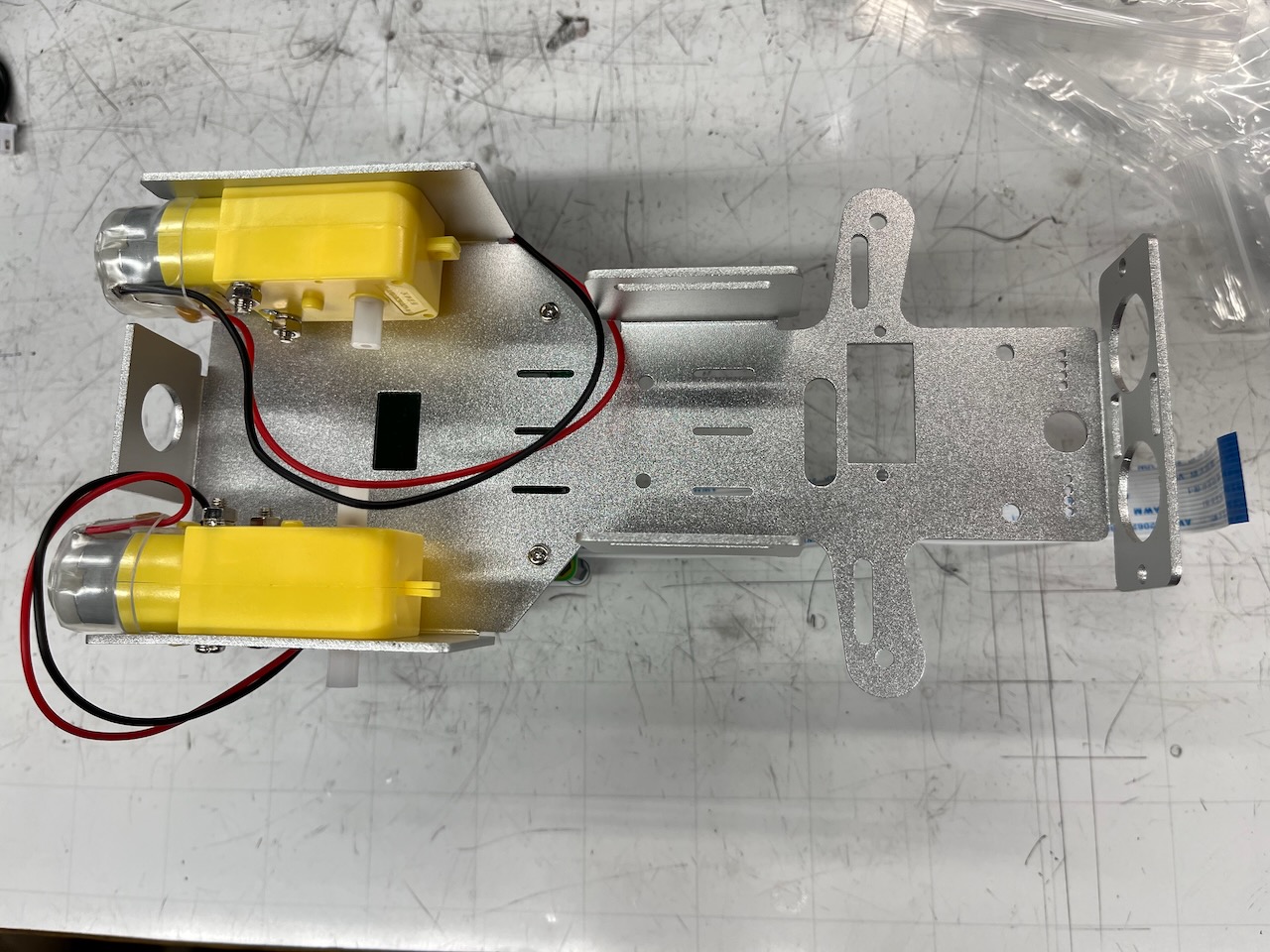
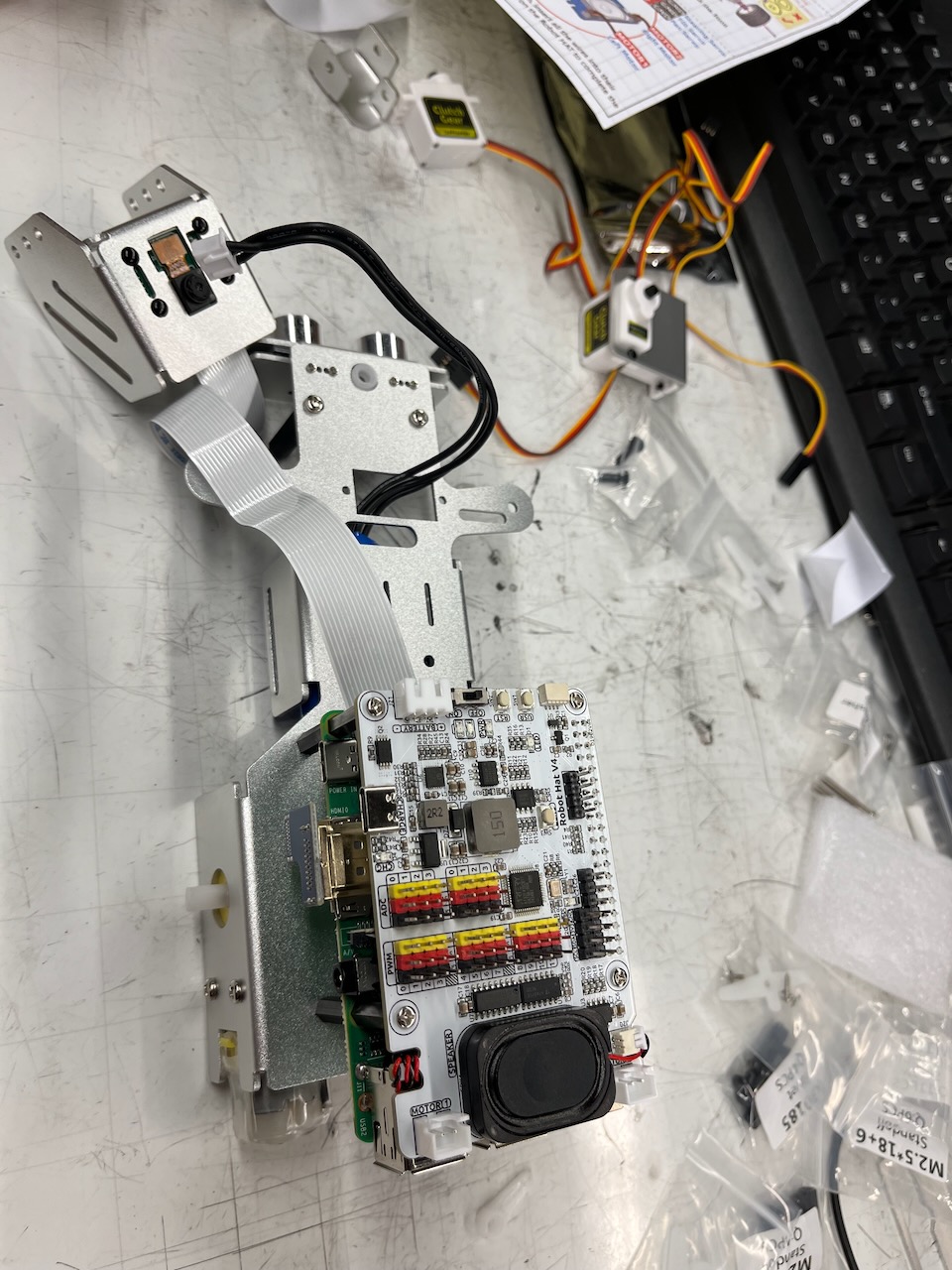
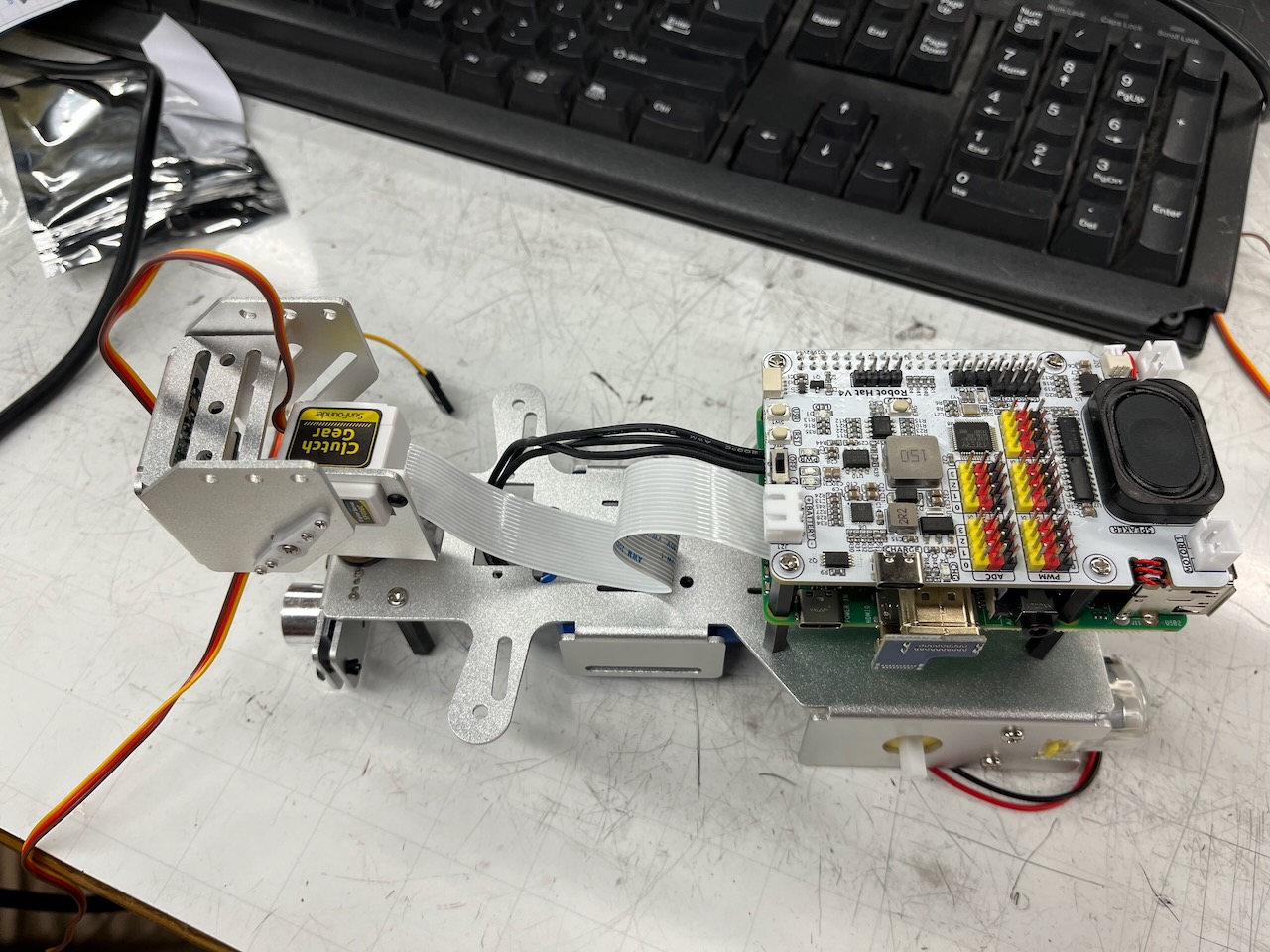
Picar build in progress
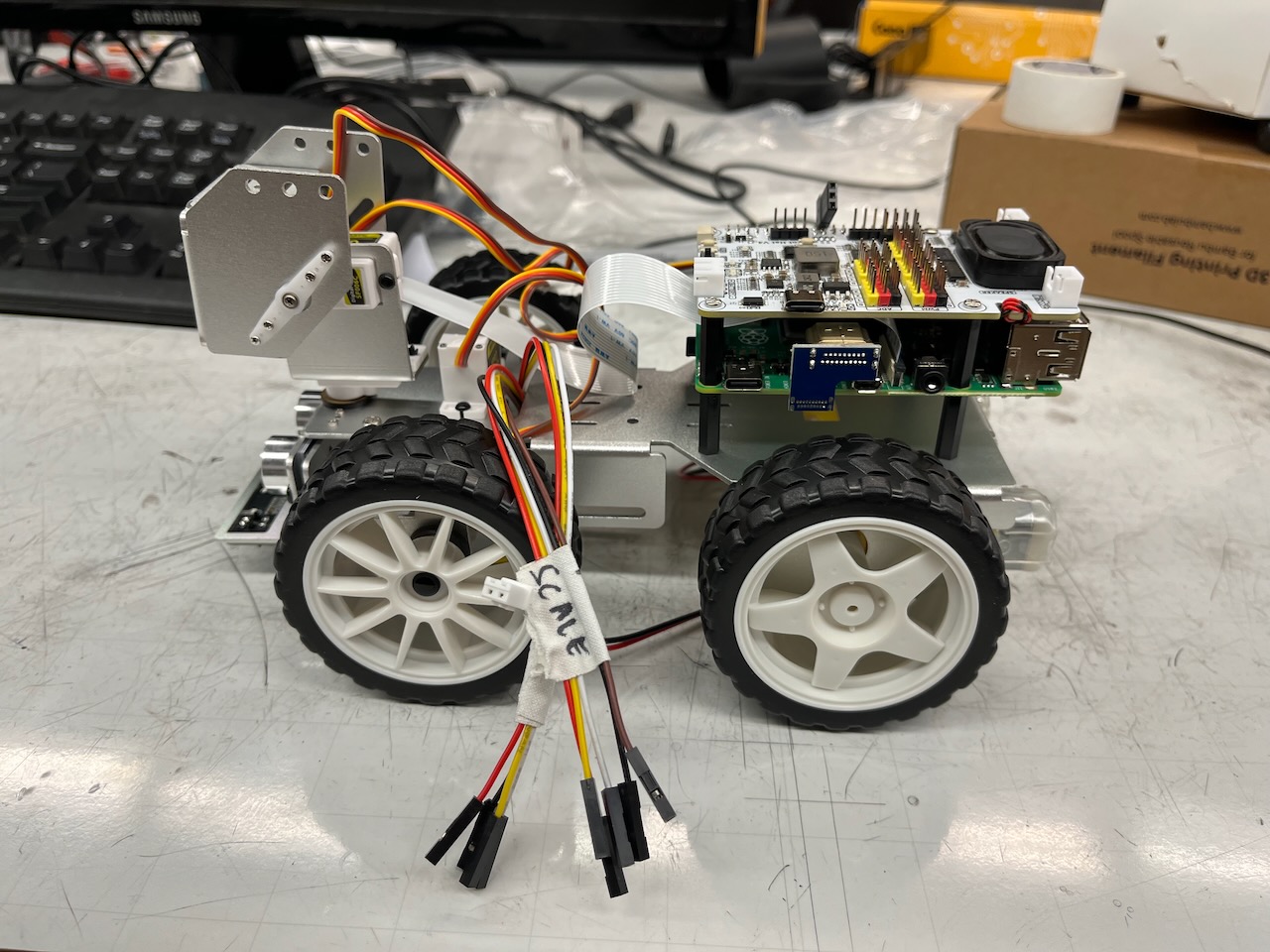
Hello Picar !!
Results
Code
The code is available at https://github.com/phanikiran1169/picar