Robotic hand featuring a wrist, dexterous and power fingers, and a palm for compliant grasping
PythonC++ControlKinematicsCANSPIUARTSEA
Scanning motion using UR10e robot for surface inspection using Inverse Kinematics and optimized waypoint sequencing
PythonC++ROS2Motion PlanningControlState MachineUR10RealsenseCMake
Physics simulation of a jack bouncing inside a cup under gravity, with external forces acting on the cup
PythonLagrangian/Impact DynamicsRigid Body Transformations
High-fidelity simulation of the DexNex bimanual teleoperation testbed
PythonDrakeROS2HITLRL
Drone navigation using A*, Potential Field and PX4-SITL, simulated in Gazebo
PX4GazeboDronekitPythonNetworkXA*Potential Field
Simulation of a youBot performing a pick-and-place task in CoppeliaSim
PythonControlTrajectory GenerationOdometryKinematicsCoppeliaSim
Simulation of predator-prey interaction using decision-making agents in a grid-based environment
PythonPOMDPA*Planning
Raspberry Pi robotic car that avoids obstacles using sonar-based sensing
PythonRPiObstacle Avoidance
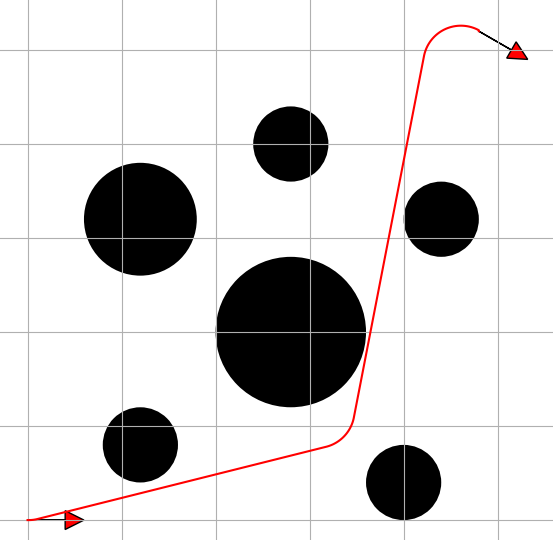
Real time planning in 2D while avoiding obstacles
MatlabNavigationFuzzy Logic
3D planning algorithm that avoids obstacles while meeting minimum turning radius and boundary conditions
PythonTrajectory GenerationRRT*Dubins